Abstract
End-to-end diffusion planning has shown strong potential for autonomous
driving, but the physical feasibility of generated trajectories remains
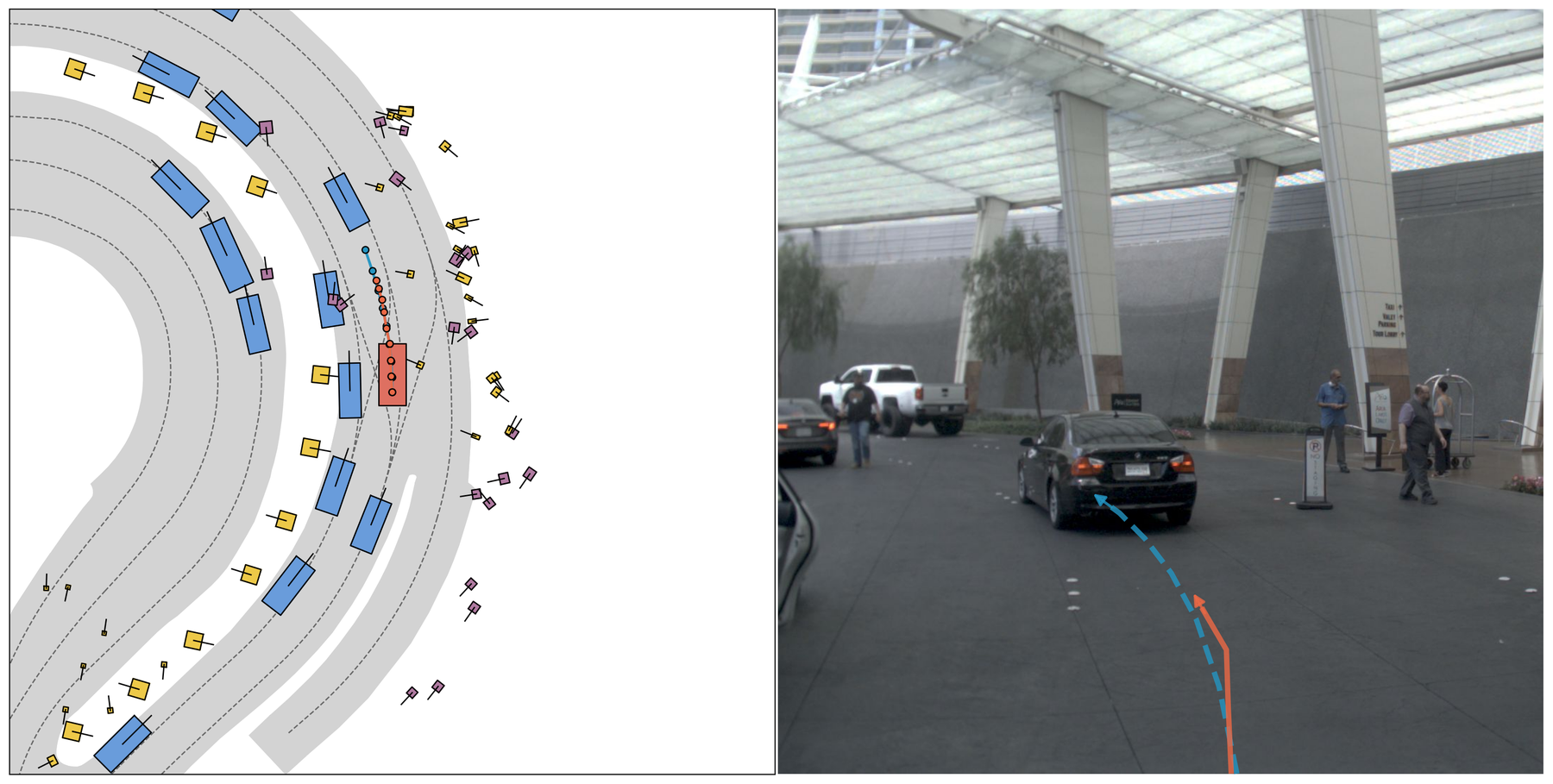
insufficiently addressed. In particular, generated trajectories may
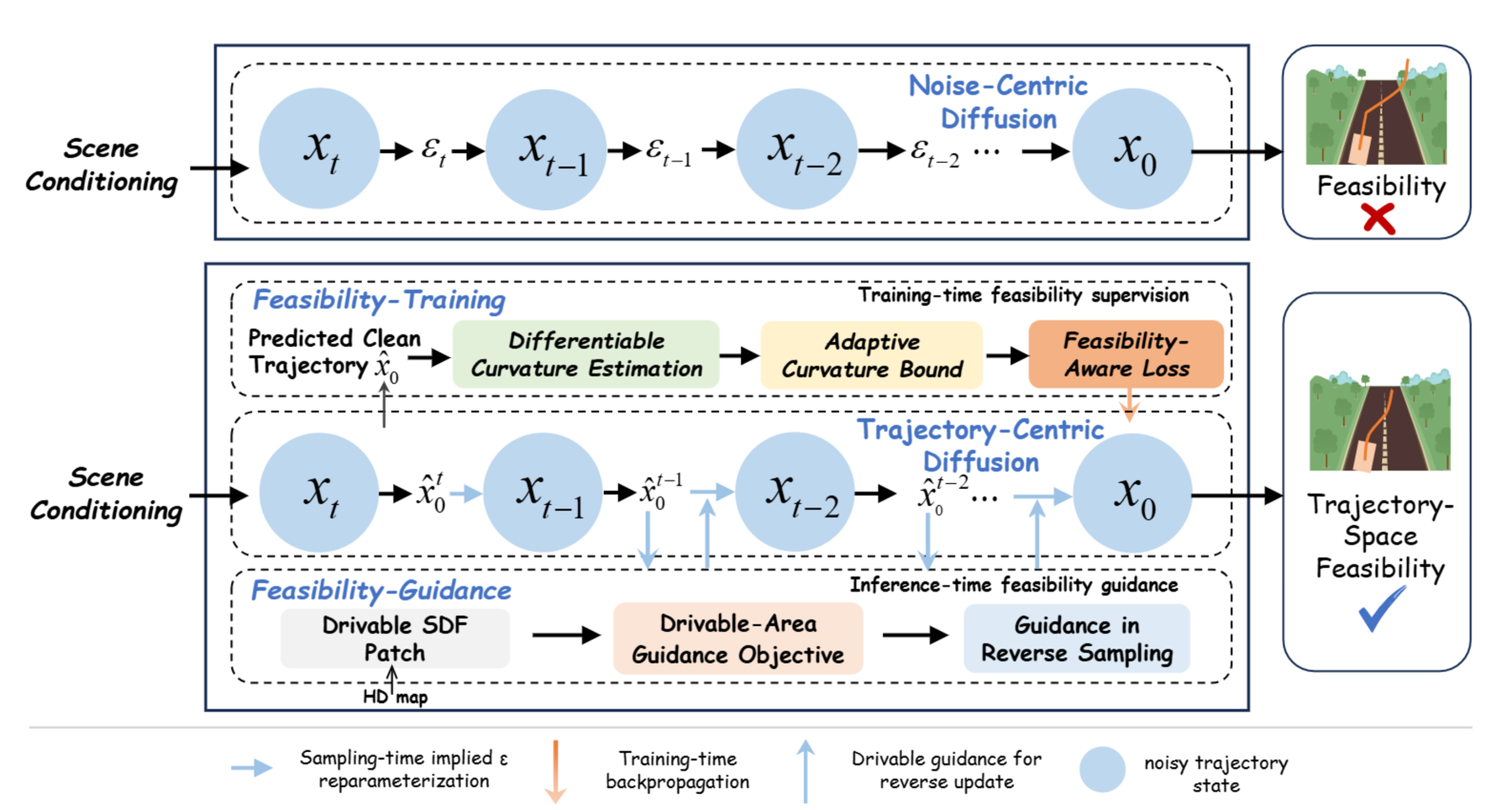
exhibit local geometric irregularities, violate trajectory-level
kinematic constraints, or deviate from the drivable area, indicating
that the commonly used noise-centric formulation in diffusion planning
is not yet well aligned with the trajectory space where feasibility is
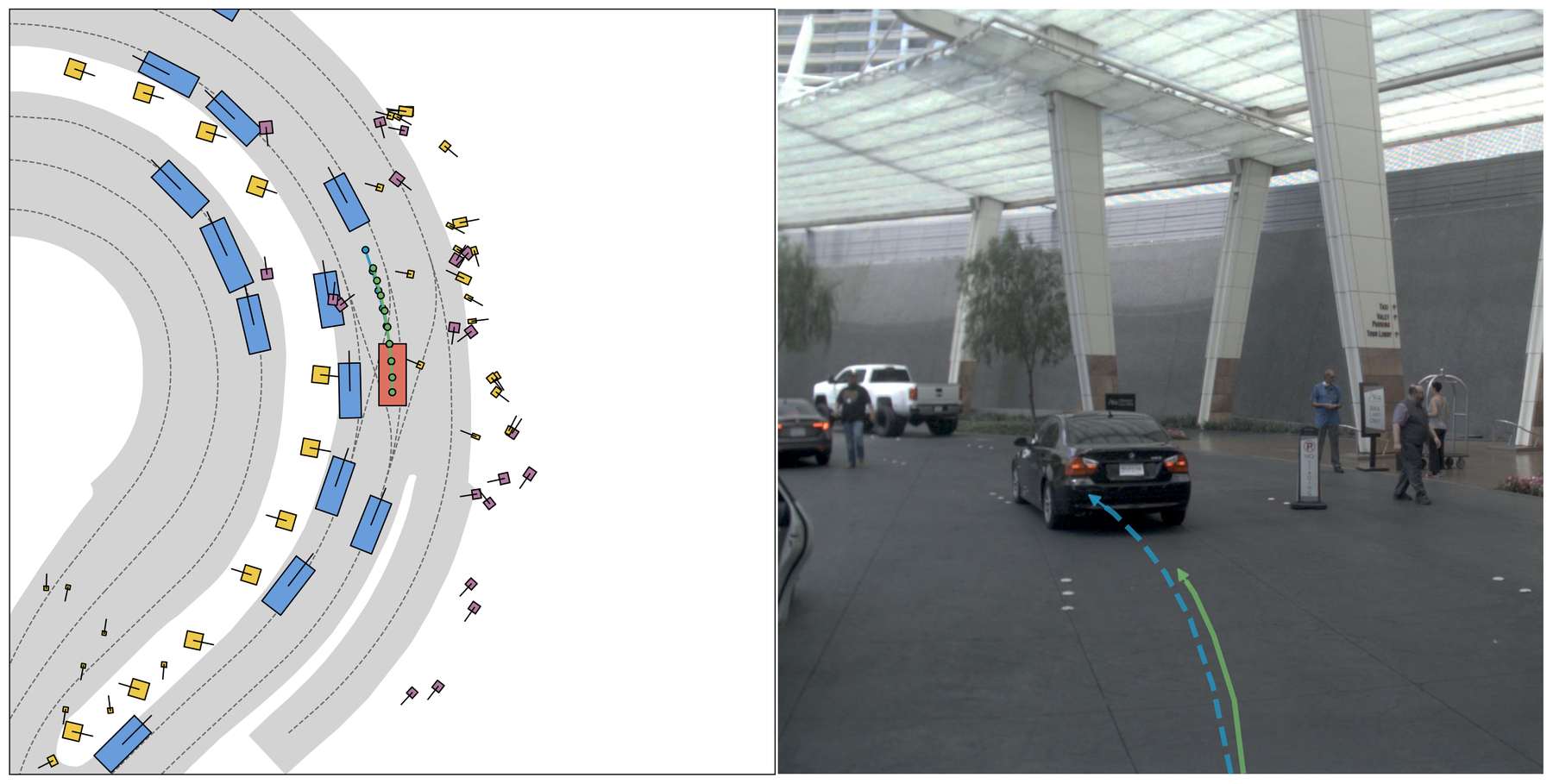
more naturally characterized. To address this issue, we propose
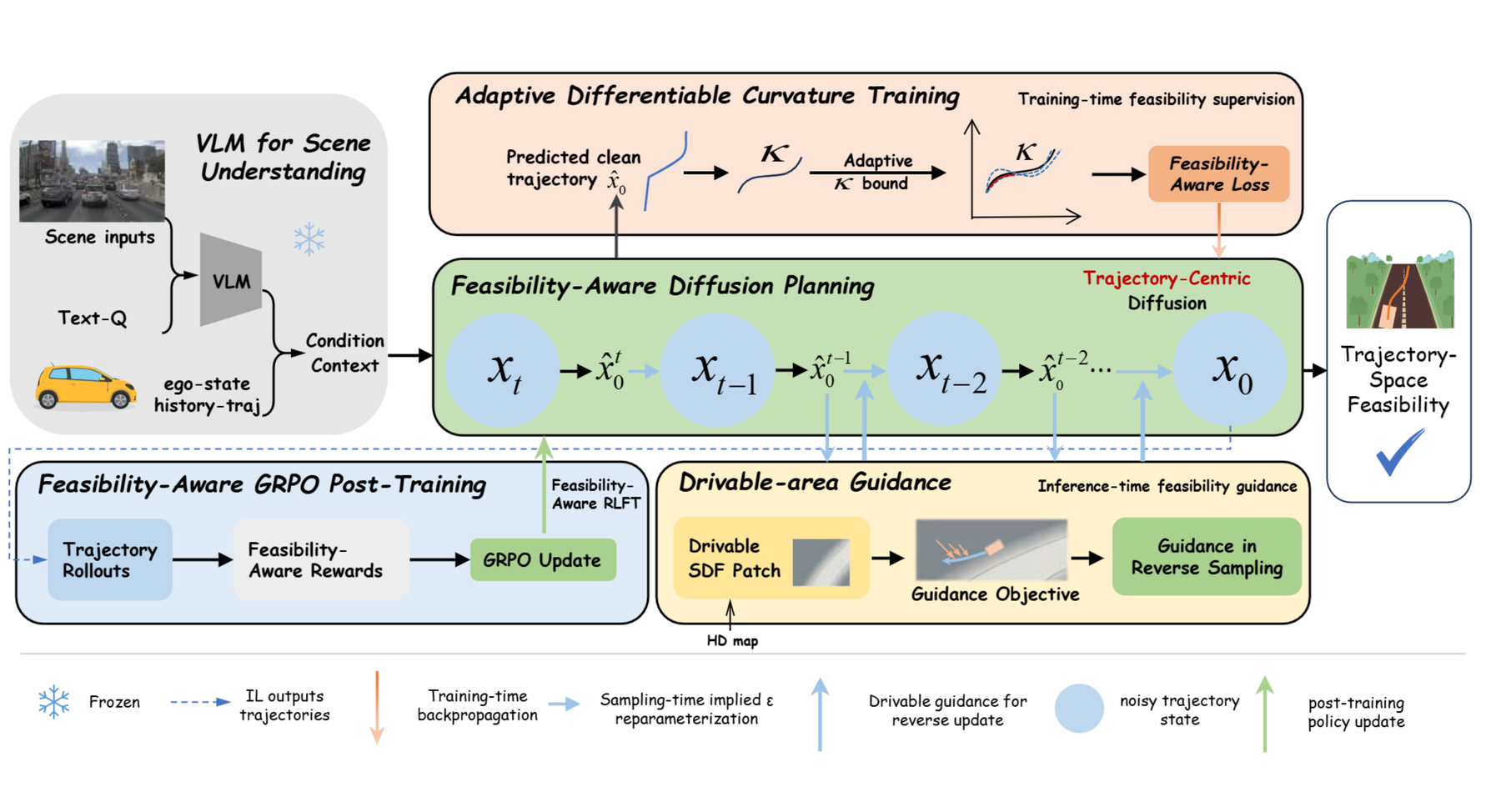
FeaXDrive, a feasibility-aware trajectory-centric diffusion planning
method for end-to-end autonomous driving. The core idea is to treat the
clean trajectory as the unified object for feasibility-aware modeling
throughout the diffusion process. Built on this trajectory-centric
formulation, FeaXDrive integrates adaptive curvature-constrained
training to improve intrinsic geometric and kinematic feasibility,
drivable-area guidance within reverse diffusion sampling to enhance
consistency with the drivable area, and feasibility-aware GRPO
post-training to further improve planning performance while balancing
trajectory-space feasibility. Experiments on the NAVSIM benchmark show
that FeaXDrive achieves strong closed-loop planning performance while
substantially improving trajectory-space feasibility. These findings
highlight the importance of explicitly modeling trajectory-space
feasibility in end-to-end diffusion planning and provide a step toward
more reliable and physically grounded autonomous driving planners.